TOP | 宇宙・海洋
Space and Ocean宇宙・海洋
宇宙・海洋に関わる開発実績
-

健気(けなげ)
JAXA研究開発部門が開発した不整地走行用マルチクローラーロボットです。4つの駆動ローラーと80度の駆動制御しない受動機構のみで、約450mmの垂直段差の岩や45度の斜面等の不整地路面を踏破することが可能です。
- 納入先
- 国立研究開発法人 宇宙航空研究開発機構(JAXA)
-
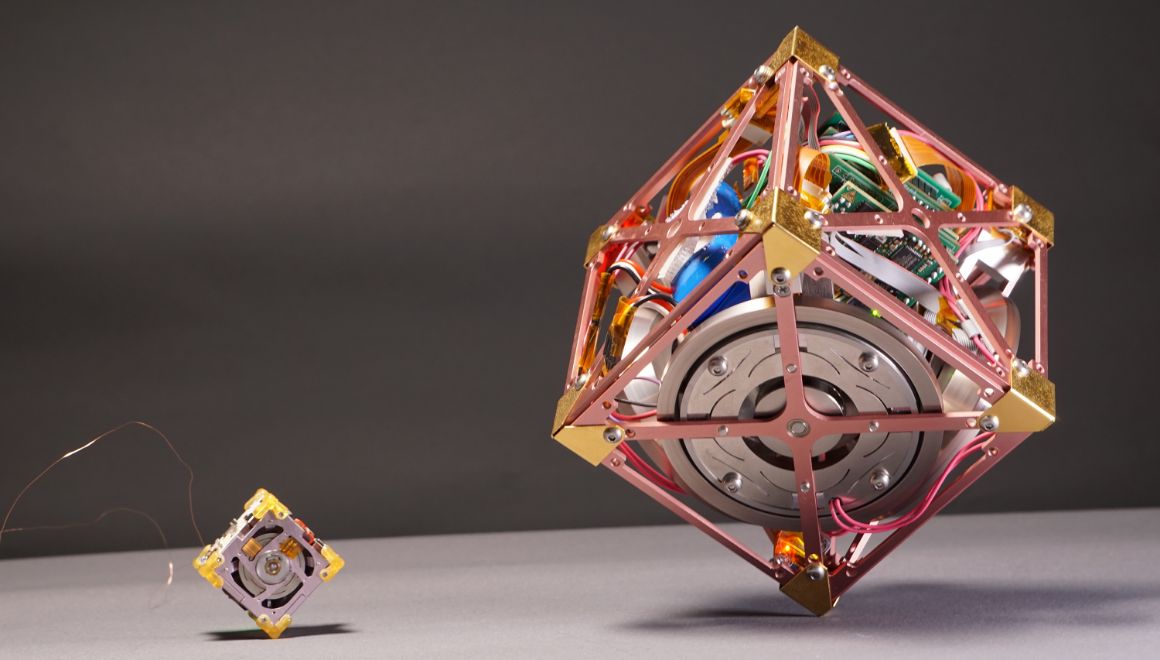
超小型3軸姿勢制御モジュール
宇宙空間で動作する人工衛星には、姿勢制御を行う際、ジャイロセンサやリアクションホイール等を利用した姿勢制御装置が不可欠です。小野電機製作所は、この装置の機構部品における開発・設計・製造を担当し、従来の姿勢制御モジュールを大幅に改良・小型化することに成功しました。打ち上げのコスト削減のため小型化が進む次世代の人工衛星等への搭載が期待されています。
- 納入先
- 国立研究開発法人 宇宙航空研究開発機構(JAXA)
-

CMGシステム実験装置
コントロールモーメントジャイロ(CMG)と呼ばれる、角運動量の交換によって任意のトルクを発生させ、人工衛星の姿勢制御を行う機構の実験用装置です。CMGシステムは、一般的なリアクションホイールを用いた姿勢制御装置に比べて、より大きなトルクを発生することが可能ですが、トルクが発生しなくなる”特異点”と呼ばれるポイントが存在し、制御の際の深刻な問題となります。その特異点を回避する制御方法の研究に使用されています。
- 納入先
- 東京都立大学 システムデザイン研究科
航空宇宙システム工学域 宇宙機力学制御研究室
-
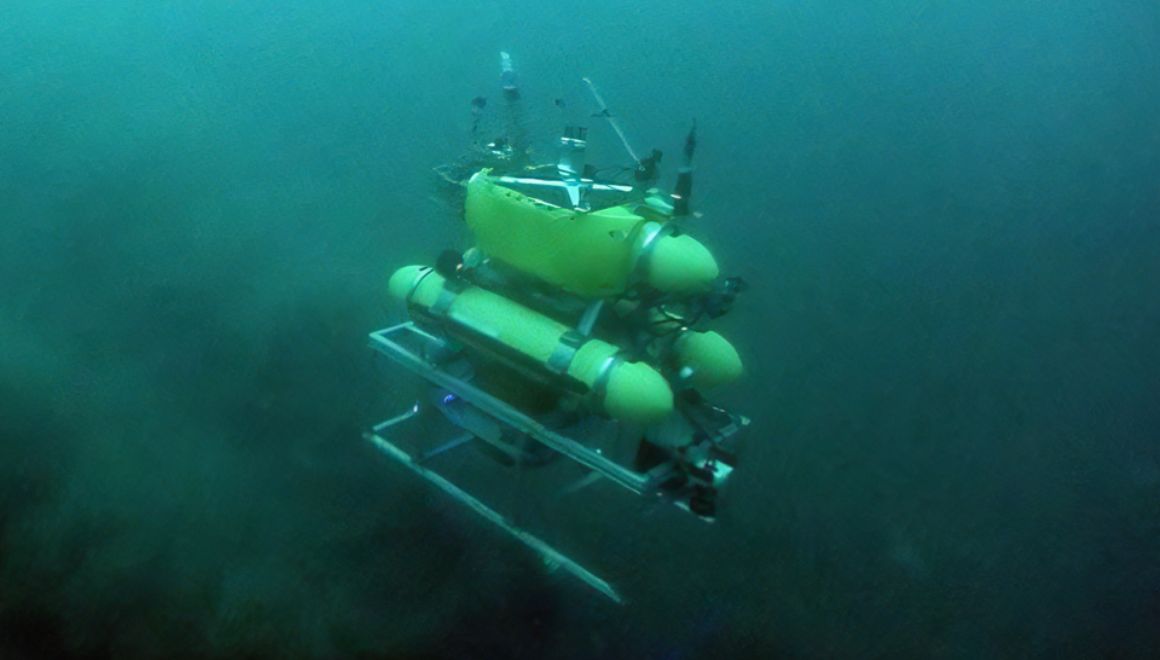
Tri-Ton
複数の撮影装置を前方/下方に搭載した自律型海中ロボットです。音響測位通信装置により、あらかじめ設置した海底ステーションを基準として現在地を推定することが可能です。海底熱水鉱床調査等で活用されています。
- 納入先
- 東京大学 生産技術研究所 巻研究室
-

MONACA
南極大陸の海洋について様々な研究を行う、国立極地研究所『GRAntarcticプロジェクト』の一環として、巨大な海氷や棚氷の下の調査を行う自律型海中ロボット(AUV)です。従来では困難だった、自律航行による海氷裏面の形状データ取得に成功しました。
- 納入先
- 東京大学 生産技術研究所 巻研究室
他の実績紹介
TOP | 宇宙・海洋